
Décembre 2015
PROJET RTKLIB SUR RASPBIAN
INSTALLER RTKLIB SUR Raspberry Pi 2
Importer RTKLIB-master
https://github.com/tomojitakasu/RTKLIB
Décompresser et placer les fichiers dans un répertoire home/pi/RTKLIB-master
Compiler les programme dans RPI:
sudo apt-get install build-essential(reference: https://github.com/ruffsl/RTKLIB-Tools/wiki/Setup)
sudo apt-get install automake
sudo apt-get install checkinstall
sudo apt-get install liblapack3gf
sudo apt-get install libblas3gf
cd app/pour 2.4.3 b....
sudo bash makeall.sh
cd app/
make
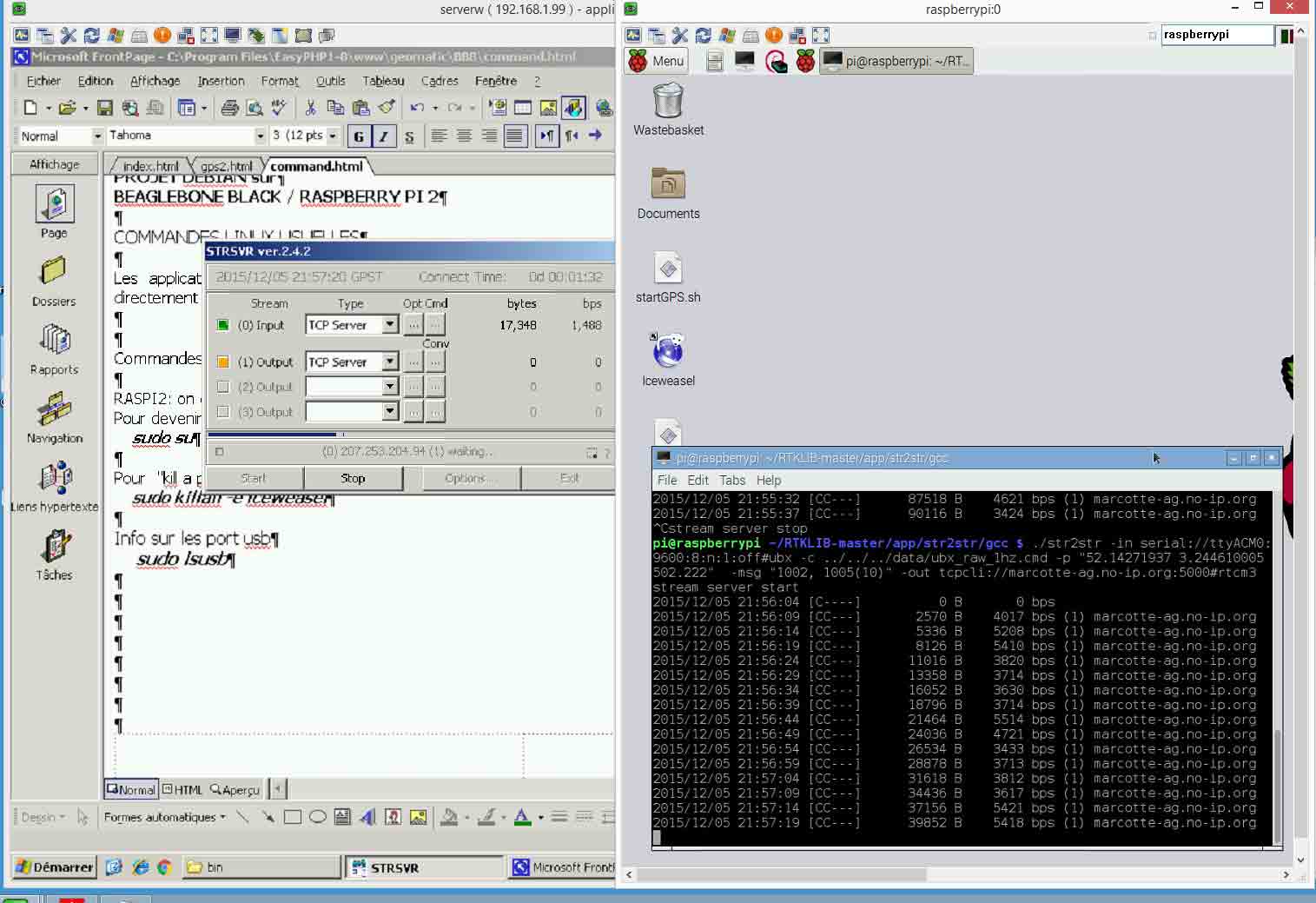
A) PROCÉDURE POUR LANCER L'APPLICATION STR2STR
attention à l'ordre et aux guillemets ...
| Pour Neo 6P: ./str2str -in serial://ttyACM0:9600:8:n:1:off#ubx -out tcpcli://server_name:5000#rtcm3 -msg "1002(1),1006(5)" -p latt long el.ell -c ../../../data/ubx_raw_1hz.cmd Pour Neo M8N: ./str2str -in serial://ttyACM0:9600:8:n:1:off#ubx -out tcpcli://server_name:5000#rtcm3 -msg "1002(1),1006(5),1010(1)" -p latt long el.ell -c ../../../data/ubx_m8n_glo_raw_1hz.cmd Pour teminer le processus sans redemarrer: sudo pkill str2str |
 |
mis à jour 18 septembre 2016:
l'application str2str 2.4.2 P11 sur RPI fonctionne bien quant l'output est ubx,
mais il y a un bogue (voir no 126) dans la conversion RTCM...
qui est supposément corrigé dans dans la version beta 2.4.3b7  | 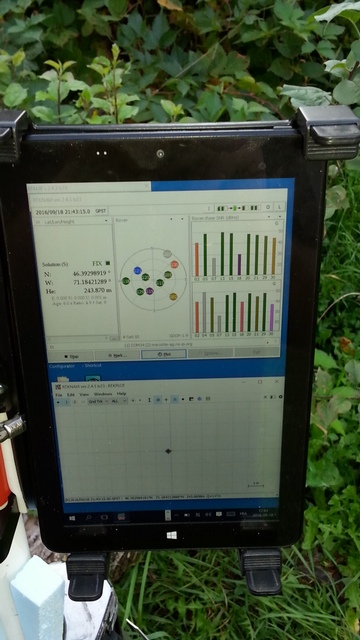 |  |
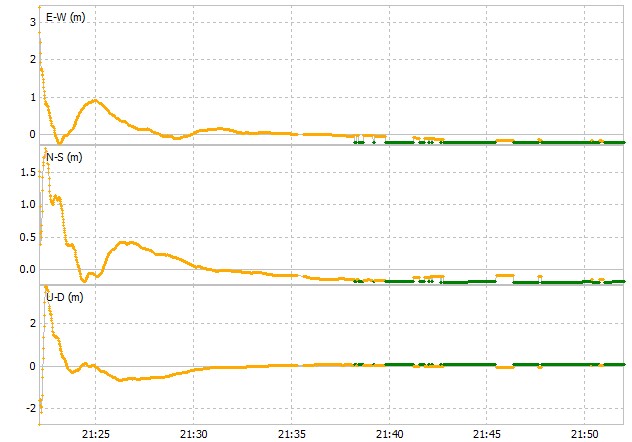
B) PROCÉDURE POUR LANCER L'APPLICATION RTKRCV
cd
..
cd RTKLIB-master/app/rtkrcv/gcc
./rtkrcv
Pour Neo M8N:
pour
une solution statique, rover en série format ubx, base TCPCLI du MERN en RTCM3
et
correction SP3 en téléchargement FTP
(permettant
en principe de conserver la précision sur une plus longue ligne de base)
nous utilisons ce fichier de configuration

dans cet exemple, le capteur est connecté à une antenne basique à $15,
la base RTCM est a 50km et l'application est le RTKRCV 2.4.3.b8 demo4 proposé
dans le blog de rtklibexplorer

retour à la section géomatique