aout 2019
PROJET RASPBERRY PI ZERO W
CONFIGURATION INITIALE DU RPIZW:
(sans accès à un moniteur - ''headless'')
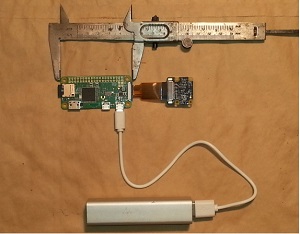 |
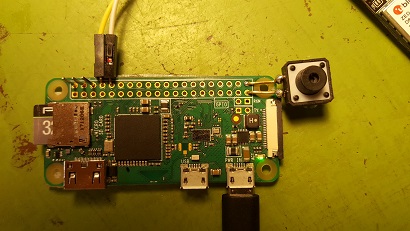
Nouvel appareil ajouté à la collection: le Raspberry Pi Zero W avec la camera infra-rouge NoIR
|
1. Télécharger la dernière version de Raspbian (ici Stretch avec GUI)
2. Installer sur une carte SD
3. Ajouter 2 fichiers dans le répertoire BOOT (référence) soit:
- wpa_supplicant.conf - réglage WiFitrouver l'adresse IP du RPIZW avec Angry IP Scanner (windows) ou Fing (android) ou autre
5. À partir de l'ordinateur,
accéder via SSH au RPIZW en entrant l'adresse
IP / user: pi / mot de passe: raspberry
sudo apt-get update
sudo apt-get upgrade
sudo raspi-config
avec les flèches selectionner 5 Interfacing Options, activer le VNC
avec les flèches selectionner 7 Advanced Options / Resolution / DMT mode 82 1920x1080 60Hz 16:9
accéder au RPIZW avec VNC Viewer en entrant l'adresse IP
user: pi / mot de passe: raspberry
a) sudo nano /etc/rc.local
[Unit]
Description=Startup Script Service
After=multi-user.target
[Service]
Type=idle
ExecStart=/home/pi/str2str_start.sh
[Install]
WantedBy=multi-user.target
cd /home/pi
sudo chmod +x str2str_start.sh
sudo mv gpslog.service /lib/systemd/system
sudo systemctl daemon-reload
sudo systemctl enable gpslog.service
8. Configuration de UART :
deux fichiers à éditer:
sudo nano /boot/config.txt
insérer les lignes suivantes à la fin:
enable_uart=1
dtoverlay=pi3-miniuart-bt
sudo nano /boot/cmdline.txt
enlever: console=serial0,115200
sudo reboot
https://www.circuits.dk/setup-raspberry-pi-3-gpio-uart/
9. Interrupteur physique pour éteindre correctement le RPI (en situation ''headless'')
connecter la pine 5 avec avec le ground 6 permet de démarrer et éteindre l'appareil
et la pines 21 avec le ground 40 permet d'éteindre seulement
éditer le fichier: sudo nano /boot/config.txt
et ajouter à la fin:
dtoverlay=gpio-shutdown,gpio_pin=21,active_low=1,gpio_pull=up
10. Procédure pour envoyer un flux NMEA corrigé de RTKRCV (RPIZW)
vers une application android sur telephone via Bluetooth
(projet fonctionnel mais compliqué à utiliser en pratique...)
A) RPIZW: configurer un SPP (Serial Port Profile)
(https://www.raspberrypi.org/forums/viewtopic.php?p=919420#p919420)
sudo nano /etc/systemd/system/dbus-org.bluez.service
Ajouter '-C' à la fin de la ligne commencant par 'ExecStart' (mode compatibilité)
et ajouter une nouvelle ligne 'ExecStartPost=' immédiatement après
le résultat final devrait être:
ExecStart=/usr/lib/bluetooth/bluetoothd -C
ExecStartPost=/usr/bin/sdptool add SP
Sauver et redémarrer
Ouvrir un terminal et lancer
sudo rfcomm watch hci0Inclure les lignes suivantes dans le fichier de configuration de RTKRCV :
B) Android: quelques applications doivent être installer (Play Store)
- NTRIP CLIENT sde Lefebure Design
- MOBILE TOPOGRAPHER
- MAPIT et/ou ORUX
'Pairer' BT le RPIZW avec le téléphone
Le NTRIP CLIENT permet de capter le signal NMEA BT et de la transférer au autres
appli. android (GPS Mock Location). Selectionner la source BT et activer Mock Location.
Régler le téléphone en conséquence:
Parametre/Plus/Options de développement/Autoriser les positions fictives
MOBILE TOPOGRAPHER est ensuite utiliser comme collecteur de données
et peut être configuré pour convertir en coordonnées cartésiennes projetées.
ATTENTION (ajout le 07.08.2018): Il y a un ordre précis à respecter:
a. sur le teléphone:
-demarrer le BT
-demarrer l'appli Lefebure et cliquer ''connect''
b. sur le RPIZW:
-lancer la commande rfcomm
-lancer rtkrcv
retour à la section géomatique